Treinamentos, Projetos e Consultoria. Eletrônica Robótica e Mecatrônica
Visualização móvel use versão PC e exibir em modo clássico.
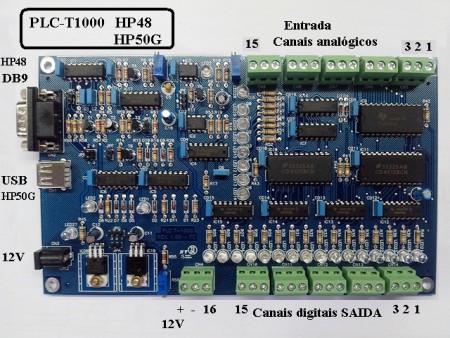
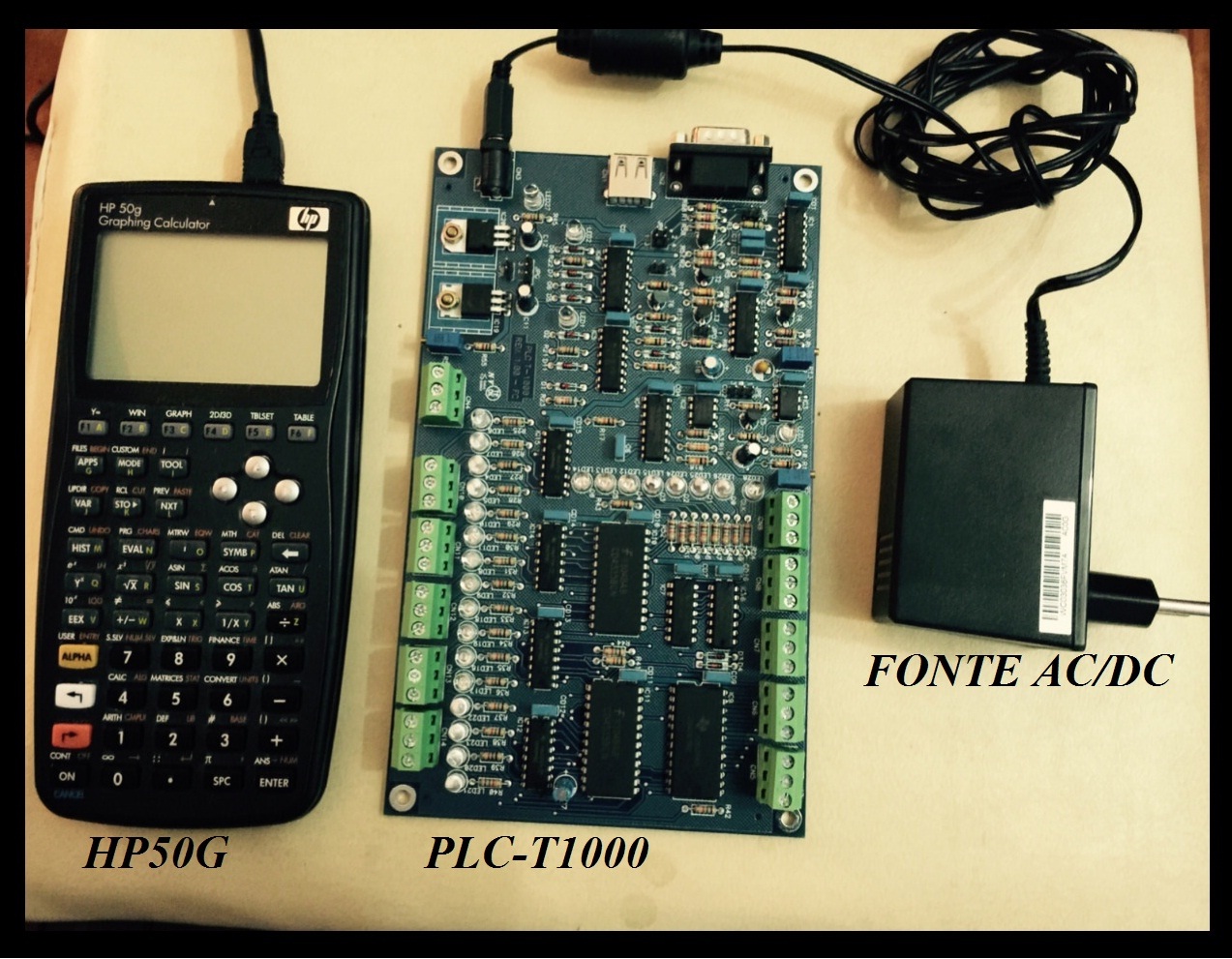
Esta é uma forma diferente de desenvolver projetos de robótica utilizando como controladoras, as calculadoras programáveis HP50G . Estas máquinas podem fazer mais do que cálculos complexos . Elas podem controlar sistemas quando conectadas a uma interface adequada. A interface mais recente é o PLC-T1000. Este sistema apresenta uma linguagem extremamente amigável, indicada principalmente para iniciantes da robótica inteligente.
Em 2009 os engenherios da NASA Mike Comberiate e Marco Figueiredo gostaram dos projetos de robótica e fui convidado a participar do PROJETO L.I.D.A.R. , um sistema de geração e reconhecimento de imagens em 3D usando raio LASER.
O certificado acima é pela minha participação no projeto L.I.D.A.R.
__________________________________________________________________
Veja o MENU
Esta página inicial apresenta um pequeno resumo de parte do conteúdo do site. Você vai encontrar, cursos com KITs de eletrônica, vídeo aulas,ebooks, KITs de robótica, rádio,programação da HP50G, programas de controle de veículos autônomos além de outros projetos interessantes para iniciantes e veteranos. Veja no menu.
__________________________________________________________________
PROJETO PRETIM

veja o vídeo do PROJETO PRETIM no final desta página.

__________________________________________________________________
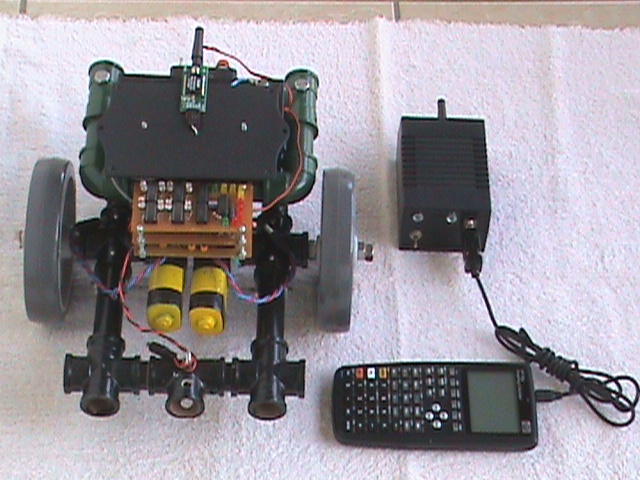
HP50G CONECTADA AO MÓDULO TRANSMISSOR PARA CONTROLE WIRELESS
_______________________________________________________________________
MODELOS DE CHASSIS
_______________________________________________________________________

HeRT. Veículo Autônomo para terrenos irregulares. Sistema de tração 4 x 4 . Opera com painel solar em ambientes externos.
_______________________________________________________________________
_______________________________________________________________________
VEICULO AUTÔNOMO RT2.

_______________________________________________________________________
CHASSIS BWB-RT
 __________________________________________________________________
__________________________________________________________________
MODELO RAYRT

____________________________________________________________________________________________
Este é o ZINT RT

___________________________________________________________________________________________

Desenvolvido pela ROBOTICATULIO. É um projeto exclusivo para a roboticatulio. Com este sistema você pode praticar automação, controle, robótica. Conheça o que o ARM9 da HP50G faz nestes projetos.
___________________________________________________________________

Vídeo no final desta página.
_____________________________
CARACTERÍSTICAS DESTES ROBÔS :
Eles são ROBUSTOS. Aguentam pêso. Transportam carga útil.
Eles são FUNCIONAIS. Podem ser facilmente adaptados para alguma função interessante.
Eles são FÁCEIS. A programação e controle é MUITO FÁCIL, principalmente para iniciantes.
_____________________________
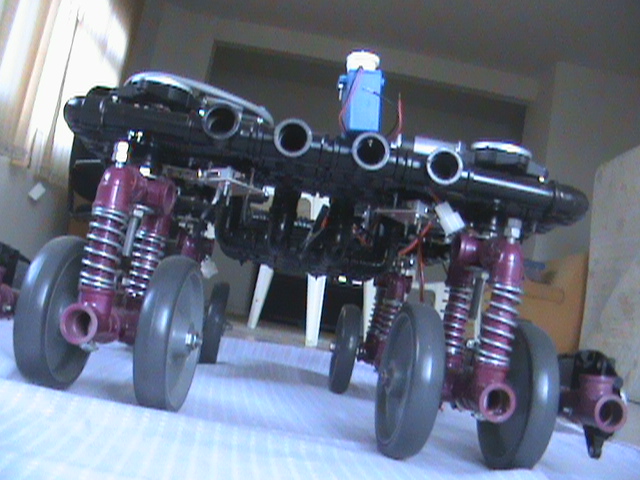
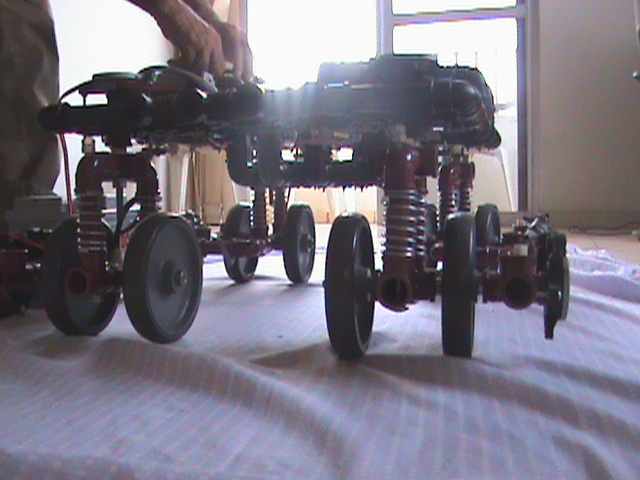
Este é o projeto THANDER. Um robo robusto com tração nas quatro rodas e um motor para controle de direção para cada conjunto de rodas de tração. Cada par de rodas possue seu próprio motor de tração(total 8 motores). Um par de amortecedores de molas para cada conjunto de rodas minimiza o impacto do terreno. Ele utiliza uma bateria automotiva 12volts 55AH proporcionando uma grande autonomia de operação. Veja este projeto em mais detalhes no menu ROBOS PROJETADOS sub ítem ROBO THANDER.
Eles devem ser capazes de reconhecer o ambiente à sua volta e navegar neste ambiente evitando obstáculos.(É um grande desafio).
Foram desenvolvidos vários modelos de veículos autonomos.Todos podem ser controlados wireless pela HP50G ou por computador PC em linguagem C++.
_______________________________________________________________________________________________________________________________
________________________________________________________________________________________________________________________________
Visite outras páginas! foram desenvolvidas para você aproveitar algum ou vários temas.
____________________________________________________________________________________________________